New modelling research to move us closer to possum eradication
As Halo Project gets closer to their goal of ‘zero density’ of possums in their core areas of West Harbour and Mt Cargill, a more targeted approach to trapping is needed to ensure that this goal can be reached. An exciting new computer model has been developed by Dr Mike Thorsen for Predator Free Dunedin which will be used to predict where possums are likely to interact with traps, based on their movement over a large area.
This new modelling research will provide us with valuable information, such as;
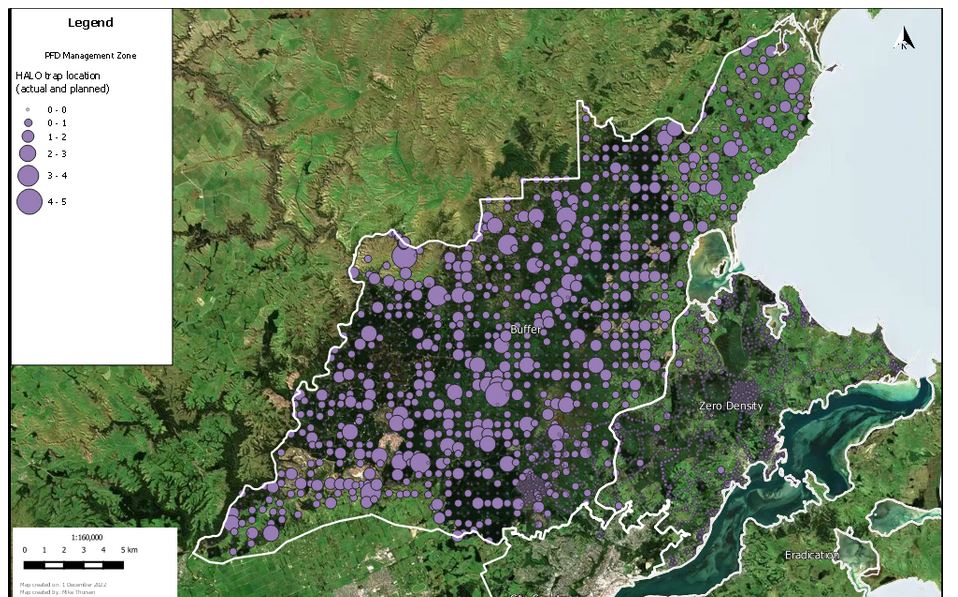
How popular existing traps are likely to be with possums
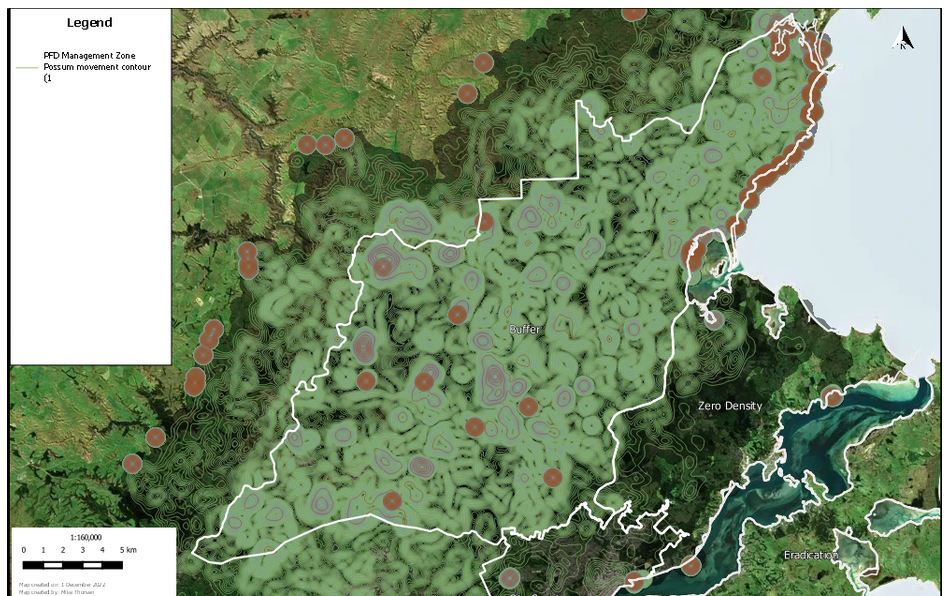
Where trapping efforts should be focused
How many possums are likely to be left in an area
This information will soon be directly impacting operations, with the Halo Project set to use this modelling to inform their trapping efforts in the near future!

The Halo Project area
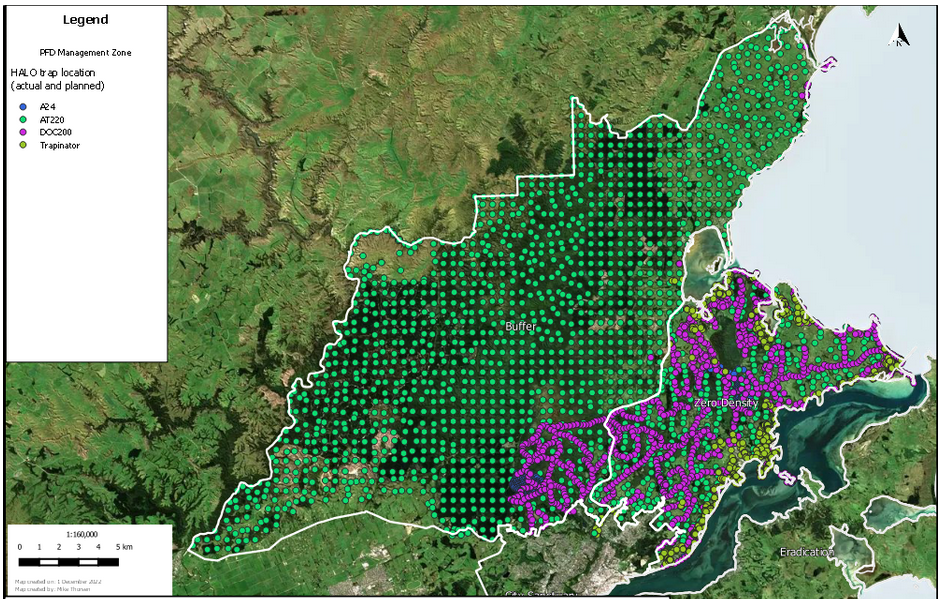
The Halo Project area consists of a core area of West Harbour and Mt Cargill and a 35,000 hectare buffer in the hinterland behind Dunedin. Within the core area, the goal is to achieve ‘zero density’ of possums. This means reducing possum numbers to such low levels that individuals are unable to find breeding partners within their home range, meaning they can’t reproduce, and ensuring possum numbers will not increase.
The extension ‘buffer’ from the Halo Project’s core area functions to protect native wildlife, improve forest health, and reduce the risk of re-invasion of possums to the wider Dunedin area, where eradicating possums is our main focus.
Interactive map of the Halo Project area with the ‘core area’ in yellow and the ‘buffer’ area in orange
In order for the Halo Project to maintain their ‘zero density’ zone, the team will need to be trapping as efficiently and effectively as possible in the buffer area. This is where our new modelling comes in.
How does the model work?
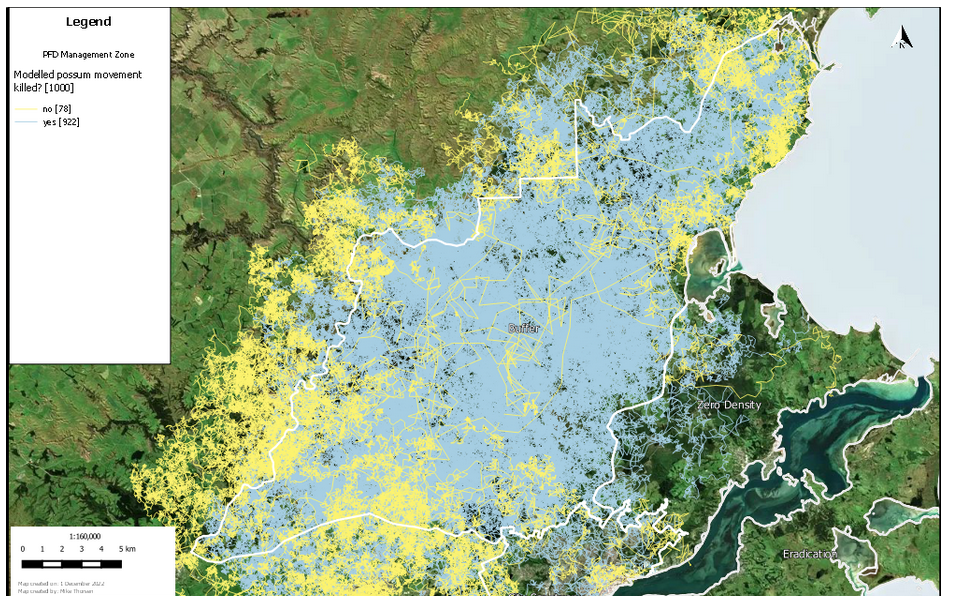
In a spatially-enabled statistical program, a virtual possum is released into the Halo area. Each virtual possum gets released at a random spot within the project area and its movement pattern varies in terms of its natural life span, the distance it likes to travel, and its ability to perceive nearby habitat. The direction of their travel is biased towards habitat that they prefer to move through. When the virtual possum stops near a trap, it will either die or survive based on the probability of the trap killing that possum on that particular day. The program is run over and over again, in this case 1,000 times.
The model uses real life measures of:
Preferred possum habitat
Possum movement (e.g. distance traveled)
Trap effectiveness
Possum life span
From these measures, it can then predict where possums are likely to be, how likely they are to encounter a trap, how effective different traps are and, therefore, where trapping efforts should be focused.
Modelling in action
The next step for this modelling is to apply it to real, on the ground operations. This is likely to be a reality for the Halo Project in the very near future. To do this, we will have to see how closely the numbers in the model match the actual numbers of possum catches in our traps. If these don’t match, we can adjust the measures accordingly, to fine tune the model.
If the model is kept up to date with real possum capture information, it will be a fantastic tool for focusing trapping efforts where they are needed most. For example, when possum numbers get lower, this modelling will help us to understand how many possums are left, and where we need to focus. Additionally, if certain traps aren’t getting any catches, the team could move these into areas that are shown to have higher capture rates.
This research will allow us to target and capture more pest species and has the potential to help us get closer to our goal of possum eradication within our lifetime!